Jad Abou-Chakra
Hi there! I am currently pursuing a PhD at the QUT Centre for Robotics where I specialize in embodied intelligence. My current research is dedicated to creating a real-time physical representation of the world.
Research
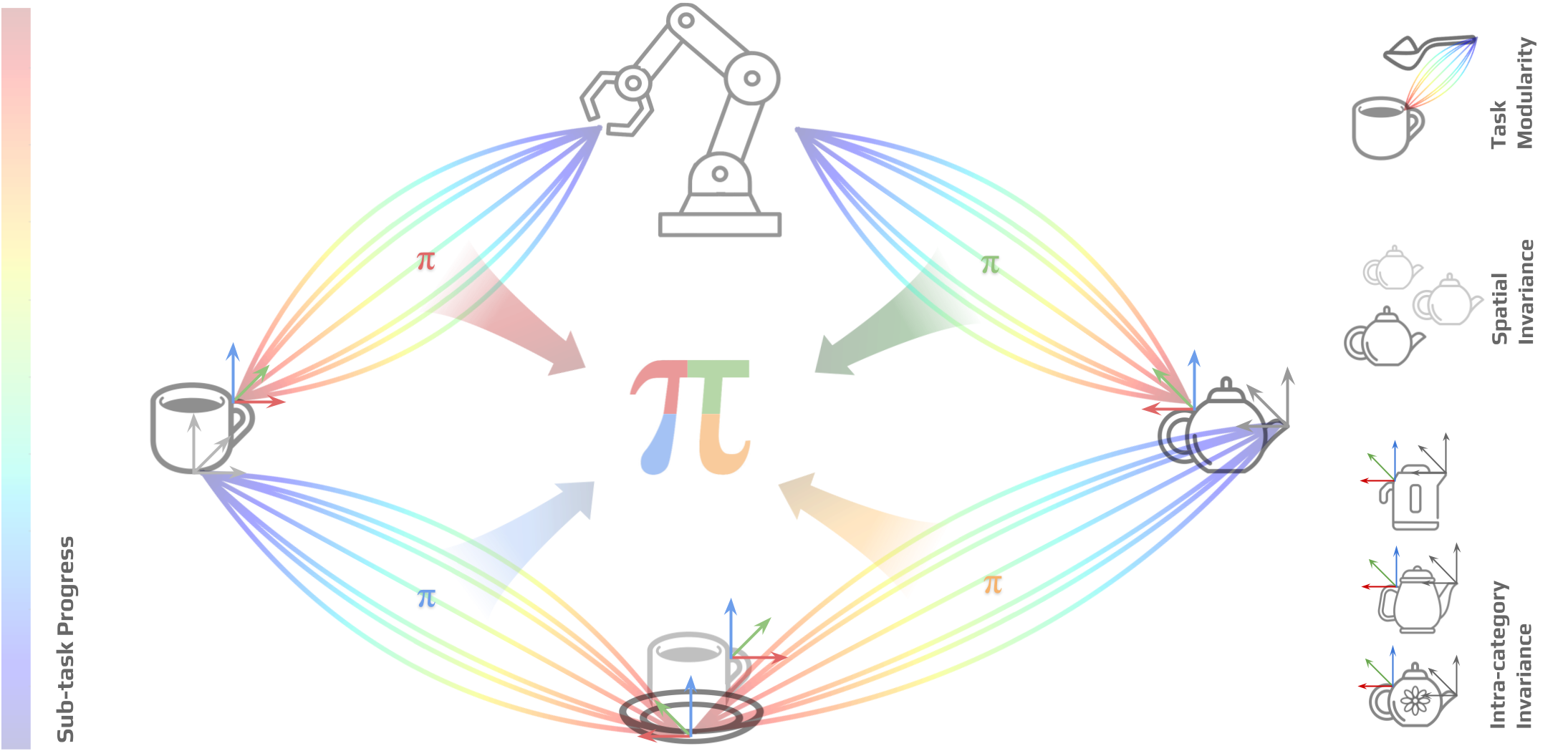
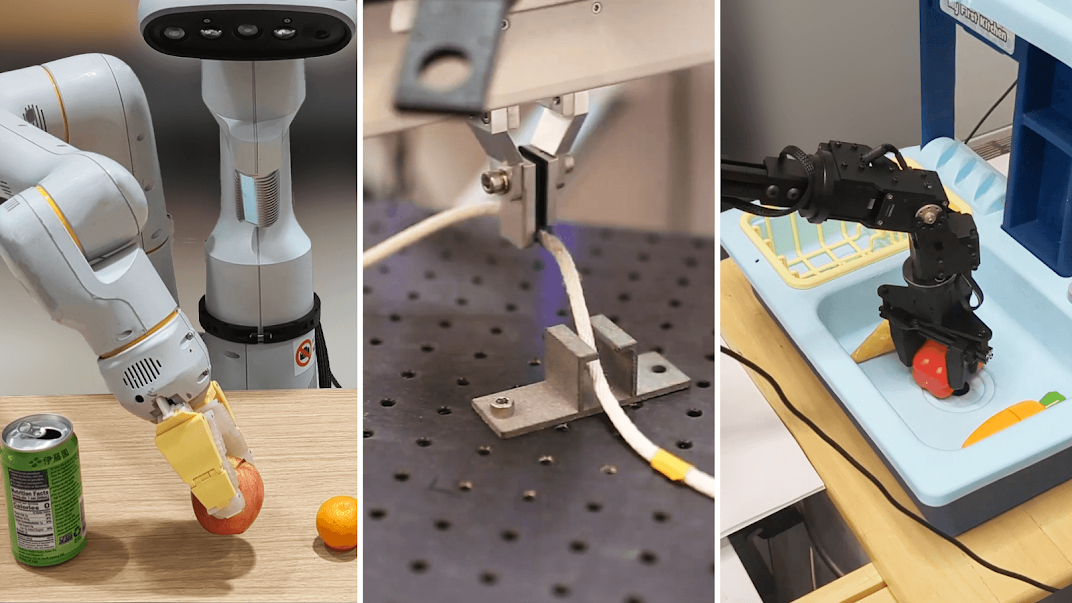
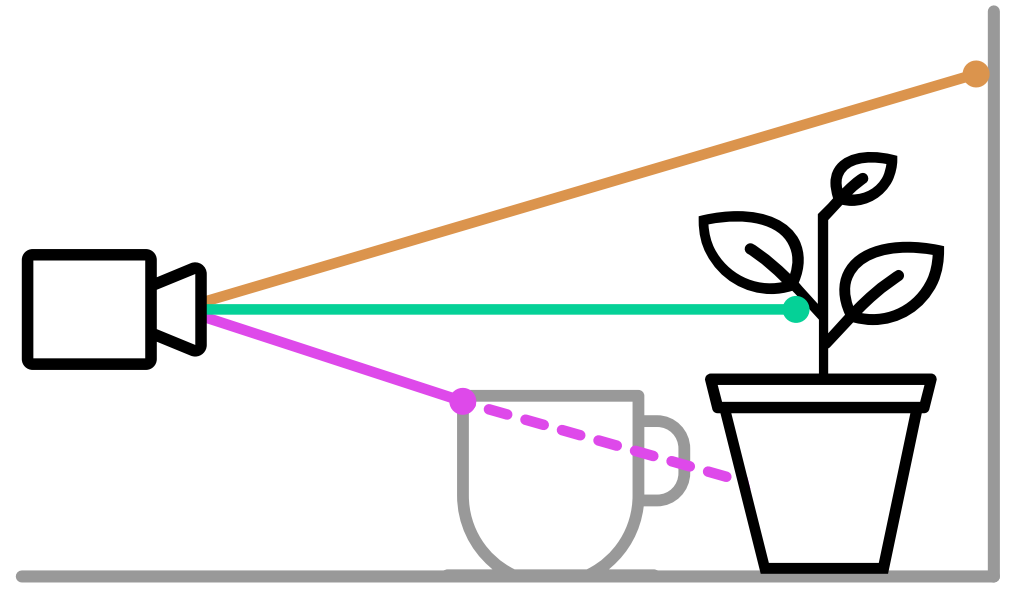
Affordance-Centric Policy Decomposition: Sample-Efficient Robot Policy Learning for Long-Horizon Manipulation